运行 Linux 操作系统
本文将使用 Bergamot 运行 Linux 操作系统.
准备
熟悉 Bergamot
在阅读本文之前,强烈推荐您通过 运行 C 语言程序 来熟悉基本的 Bergamot 架构和仿真原理.
从预构建的 fw_payload.bin 直接启动
如果您不想自己构建 linux 内核, 我们提供了预构建的 fw_payload.bin, 可以直接启动 linux.
- 进入 Releases 页面, 下载预构建的
fw_payload.bin. - 按照下面的步骤准备
boot.hex和sim_dt.dtb. - 执行仿真命令
./obj_dir/VVerilatorTestCore +Bfw_payload.bin +Dsim_dt.dtb.
运行将持续 15-30 分钟, 中间会输出 linux 内核日志, 最后 linux 将启动 \init, 预构建的 fw_payload.bin 将调用 uname -a 输出系统信息, 之后进入 \bin\sh BusyBox 终端.
构建 OpenSBI
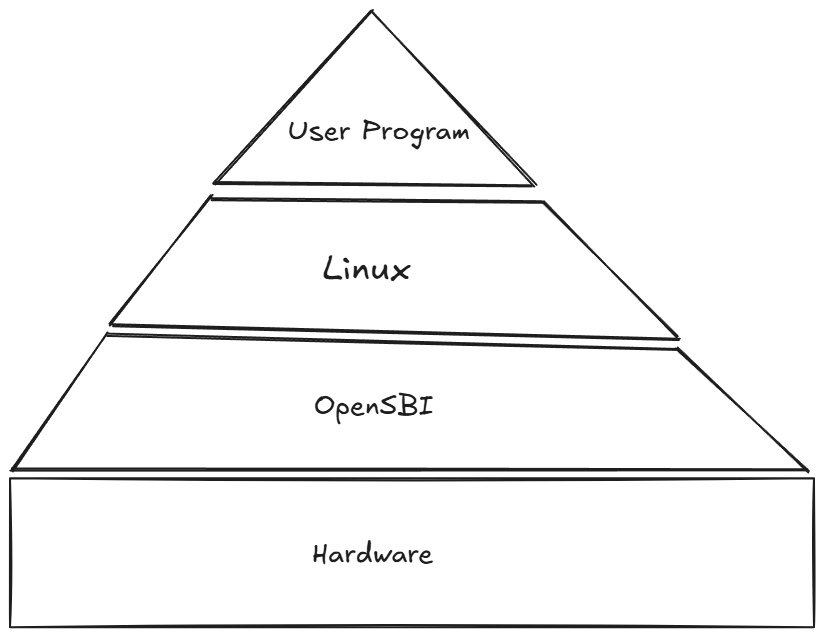
观察 RISC-V 的指令集, 我们可以发现, RISC-V 官方没有对任何硬件和物理环境做出假设, 一切的硬件操作均靠实现厂商来实现. 但是如果我们不想关心硬件驱动, 就可以调用基本的硬件操作, 例如通过 C 语言编写用户代码可通过 printf 函数直接在命令行打印字符串, 该怎么办?
RISC-V 官方制定了 S 模式二进制接口(SBI), 其中定义了多种常见的, 最基本的硬件操作函数, SBI 服务程序运行在 M 模式 下, 因此可以直接访问硬件, 可以为 S 模式 下的程序(一般是操作系统)提供最基本的硬件使用能力, 而无需关系硬件的底层实现.
例如, SBI 定义了 sbi_printf 函数, S 模式下的操作系统可以直接调用此函数, 实现在控制台打印字符. 当然 SBI 的服务依然需要厂商自己来实现.
RISC-V 官方提供了 SBI 的模板实现, 称为 OpenSBI, 其中提供了几种硬件驱动, 可供CPU厂商提供实现的参照模板, RISC-V 官方推荐CPU厂商实现 SBI 服务.
为了运行 Linux 操作系统, Bergamot 提供了两个基本硬件:
- 符合 CLINT 规范的定时器, 用于操作系统的进程调度
- UART8250 虚拟串口, 用于打印字符串到控制台, 以及用户输入.
幸运的是, OpenSBI 已经为我们提供了这两个外设的驱动, 因此我们无需编写驱动程序.
除此之外, OpenSBI 最重要的作用是提供启动引导(Boot Loader), OpenSBI 在启动之后, 将执行权交给 Linux, 然后正式启动 Linux. 当然其他启动引导, 例如 U-Boot 也可以完成.
拉取 OpenSBI 源代码:
git clone https://github.com/riscv-software-src/opensbi
cd opensbi
设置交叉编译器:
export CROSS_COMPILE=riscv32-unknown-linux-gnu-
export PLATFORM_RISCV_XLEN=32
最后编译 generic 平台下的固件:
make PLATFORM=generic
最后, 生成的固件在 build/platform/generic/firmware/ 下面.
测试 OpenSBI
拷贝 fw_payload.bin 到 simulator 目录下面, fw_payload.bin 是 OpenSBI 的无格式二进制固件.
OpenSBI 提供了三种固件:
- payload: 直接将待引导的程序拼接在
fw_payload.bin后面, OpenSBI 启动后将直接引导该程序. - jump: OpenSBI 启动后跳转到指定的程序入口, 开始执行下一阶段的程序.
- dynamic: OpenSBI 启动后从上一个启动阶段获取引导信息, 然后引导下一阶段的程序.
在本实例中, 我们使用 payload 固件, 将 Linux 镜像直接附加在 fw_payload.bin 后面, 因为现在还未编译 Linux 因此 fw_payload.bin 是一个空引导.
具体使用可参考 OpenSBI 目录下的 docs 文档.
拷贝 VerilatorTestCore.sv 到 simulator 目录下.
目前, 启动 OpenSBI 基本的准备工作已经结束, 最后一个问题是 OpenSBI 如何识别我们的硬件? Linux 为了增加硬件驱动的可移植性, 引入了设备树的概念, 设备树 是一种数据结构, 描述了当前硬件平台下所有的硬件信息, Linux 根据设备树来配置驱动程序. 相同的 OpenSBI 也同样使用设备树来识别硬件.
我们已经为您编写好了设备树文件 simulator\sim_dt.dts , 您可以查看里面描述的硬件内容. 设备树需要编译为特定的二进制数据结构, 需要使用 dtc 命令来编译设备树.
执行 make 将编译 Verilator 以及设备树.
最后, 我们仍然需要一个 boot.bin 来引导 OpenSBI, 因为 OpenSBI 的 payload 固件规定:
a0寄存器放入 Hard ID.a1寄存器放入设备树所在的内存地址.
具体代码请查看 boot.S 文件, 通过编译得到下面的指令码:
80000637
f1402573
8ff005b7
000600e7
00000000
00000000
00000000
00000000
将上述内容以 文本 的形式直接保存在 simulator 文件夹下的 boot.hex 文件即可.
最后执行仿真命令:
./obj_dir/VVerilatorTestCore +Bfw_payload.bin +Dsim_dt.dtb
终端默认将每隔 1000000 个周期报告一次, 若成功进入 OpenSBI 将在终端打印 OpenSBI 的 Banner. 稍微等待一会, OpenSBI 将打印启动参数报告. 到这里, OpenSBI 即可正常启动.
拉取 Linux 源码并编译
拉取 Linux 源码仓库:
git clone https://github.com/torvalds/linux
cd linux
设置内核编译选项:
make ARCH=riscv CROSS_COMPILE=riscv32-unknown-linux-gnu- menuconfig
建议将其剪裁到最小内核, 可以大大降低启动时间, 但是要保证 Platform type>Base ISA=RV32I 以及 Platform type>FPU Support=False (不使用FPU).
最后编译构建内核:
make ARCH=riscv CROSS_COMPILE=riscv32-unknown-linux-gnu- Image
最后将得到非压缩无格式内核镜像 arch/riscv/boot/Image .
制作 Payload 启动镜像
将上一步得到的 Image 文件复制到 OpenSBI 的根目录下面. 并使用下面的命令重新编译 OpenSBI:
make PLATFORM=generic FW_PAYLOAD_PATH=Image
这样, 编译产物 fw_payload.bin 将附加上 Linux 镜像.
将得到的固件再次拷贝进 simulator , 并运行仿真程序.
在 OpenSBI 打印完启动参数报告之后, 就会将执行权交给 Linux 执行, Linux 将会在终端打印内核日志.
制作 BusyBox 根文件系统
在上一步中, 由于 Linux 找不到合适的根文件系统以及 init 程序, Linux 将 panic 并停止运行. 此步骤将使用 BusyBox 制作根文件系统.
BusyBox 是一个精简的 Linux 根目录系统实现, 实现了基本的 Linux 的命令程序, 可以在其网站下载源代码.
使用下面的命令配置和编译 BusyBox:
make ARCH=riscv CROSS_COMPILE=riscv32-unknown-linux-gnu- menuconfig
make ARCH=riscv CROSS_COMPILE=riscv32-unknown-linux-gnu-
创建 rootfs 目录, 将 BusyBox 安装到该目录下面:
make install ARCH=riscv CROSS_COMPILE=riscv32-unknown-linux-gnu- CONFIG_PREFIX=./rootfs
观察 rootfs 目录, 目录结构就是一个最基本的 Linux 根文件系统, 在 bin 目录下, 所有的常用命令都被链接到 busybox 一个可执行文件下.
除此之外, 还需要两个设备文件:
cd dev
mknod console c 5 1
mknod null c 1 3
您可能还需要拷贝库文件, 如果您不是静态链接的话. 另外您可能还需要编写一些 etc 配置文件.
再次进入 Linux 的 menuconfig, 找到 General setup>Initial RAM filesystem and RAM disk (initramfs/initrd) support 并打开此选项以开启 initramfs 支持, 并在下方 Initramfs source file(s) 将 rootfs 目录填进去.
再次编译 Linux , 此时得到的 Image 将包含我们制作的根文件系统. 并且使用新的 Image 再次编译 OpenSBI, 将新的 fw_payload.bin 固件放入 simulator 目录下, 执行仿真程序.
最后将进入 Linux Bash Shell.